Część aukcji Linie prasowe z branży motoryzacyjnej
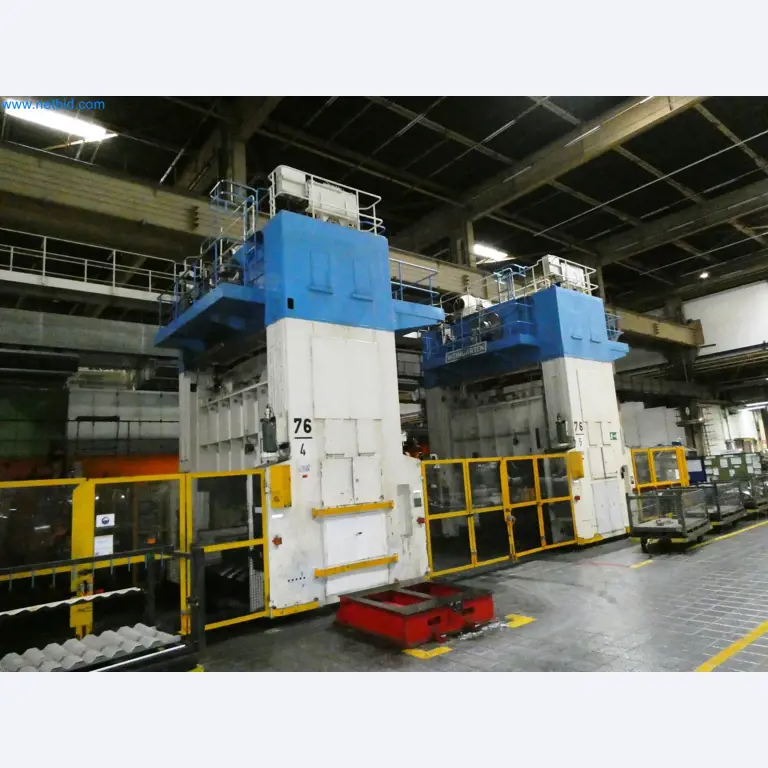
Linia prasowa (76) SchulerTRADING#18844-5000



















































































































































































Szczegóły
Marka
Schuler
Opis
ostatni remont w 1998 r., skladajacy sie z:
automatyki slepej ze stacja rozladunku palet, produkcji ASM, typ ECPL-76, z wózkiem do wymiany palet, stolem podnoszacym, tasma transferowa do chwytaka, nr maszyny 0903700; system chwytaka, nr maszyny. 0600200, w. sterowanie, marka Helm, typ Loadgard PTM Series, kontroler polozenia, marka Balluff
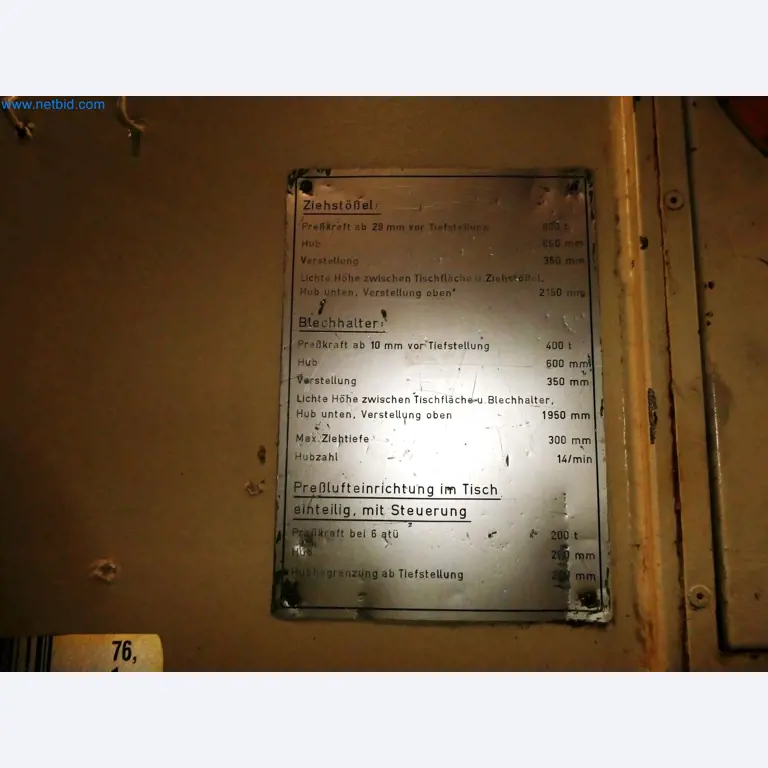
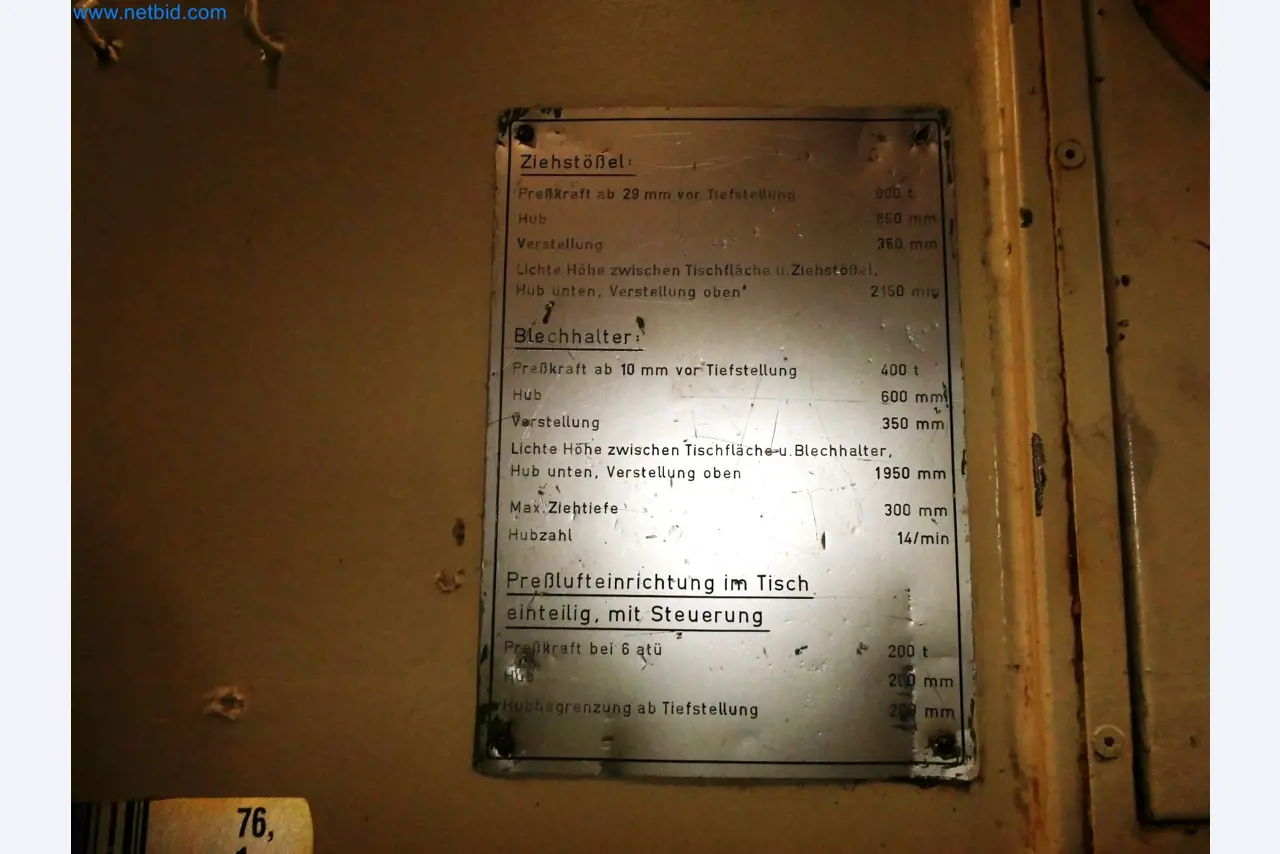
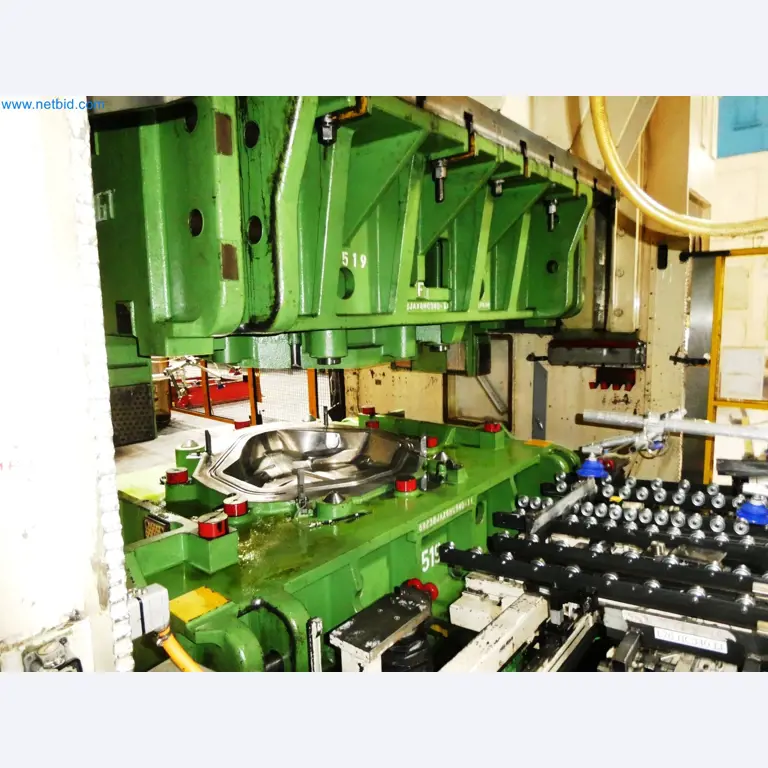
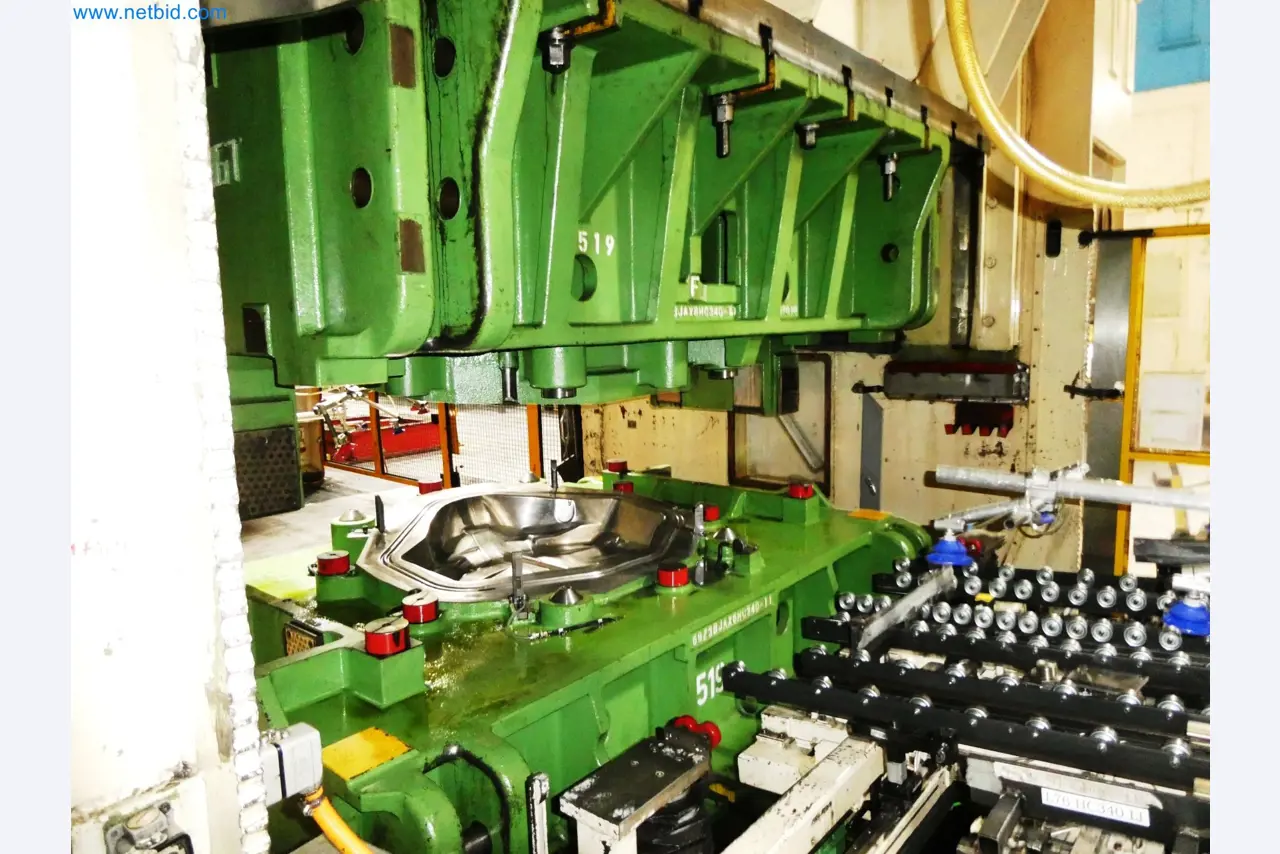
hydr. prasa, marka Weingarten, typ ZS 1260.34, rok 1967, nr zamówienia 48B/66, nr systemu 01761.00, podwójne dzialanie, sila nacisku 800 t, skok 850 mm, regulacja skoku 350 mm, wysokosc w swietle miedzy powierzchnia stolu a silownikiem ciagnacym 2,150 mm, sila nacisku uchwytu arkusza 400 t, skok 600 mm, regulacja 350 mm, wysokosc instalacji w swietle 1.950 mm, glebokosc tloczenia maks. 300 mm, skok 14/min, stól z rowkami teowymi, 2.220 x 3.100 mm, sterowanie, typ Press OP-96 (Siemens S5)
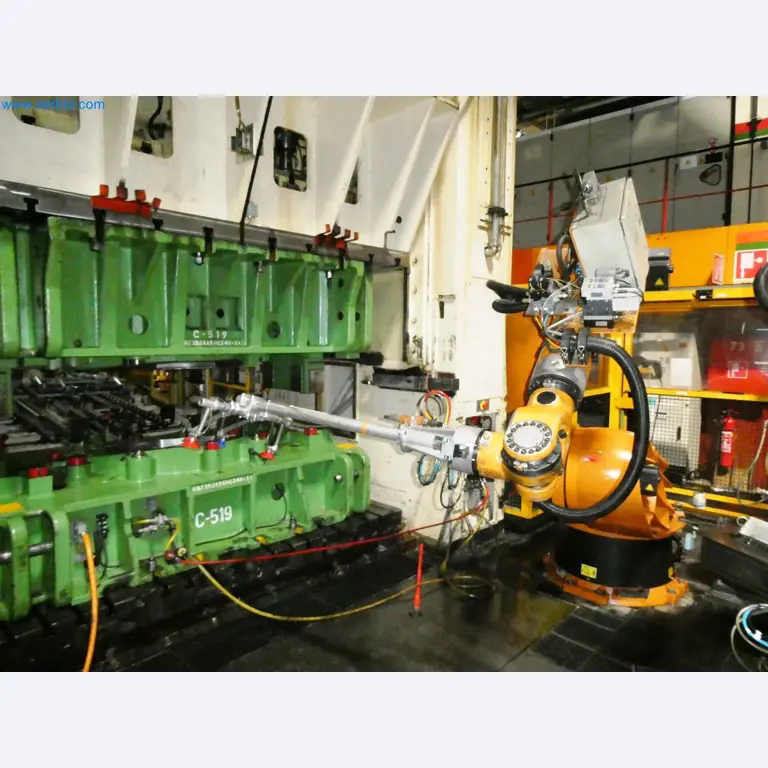
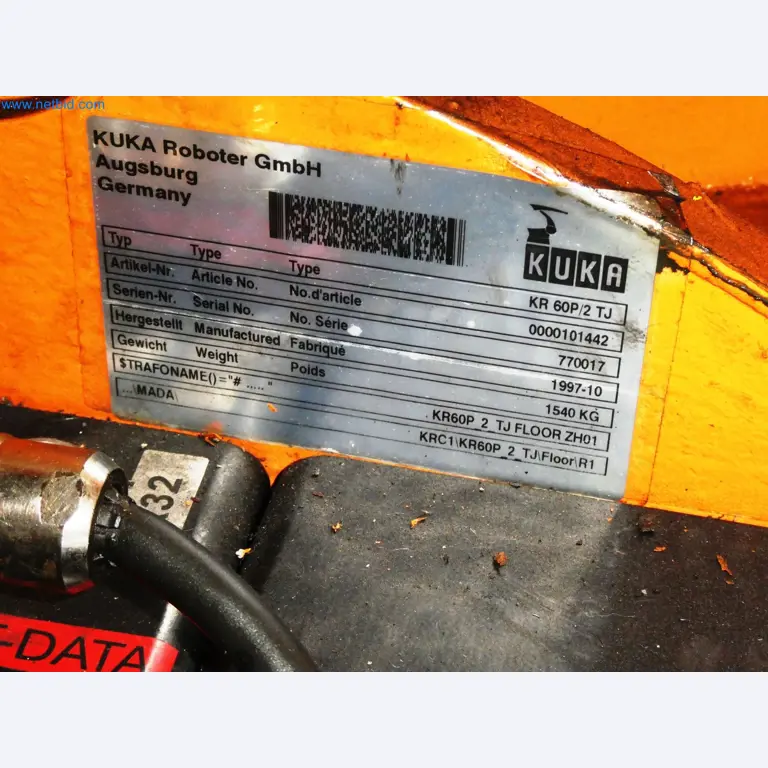
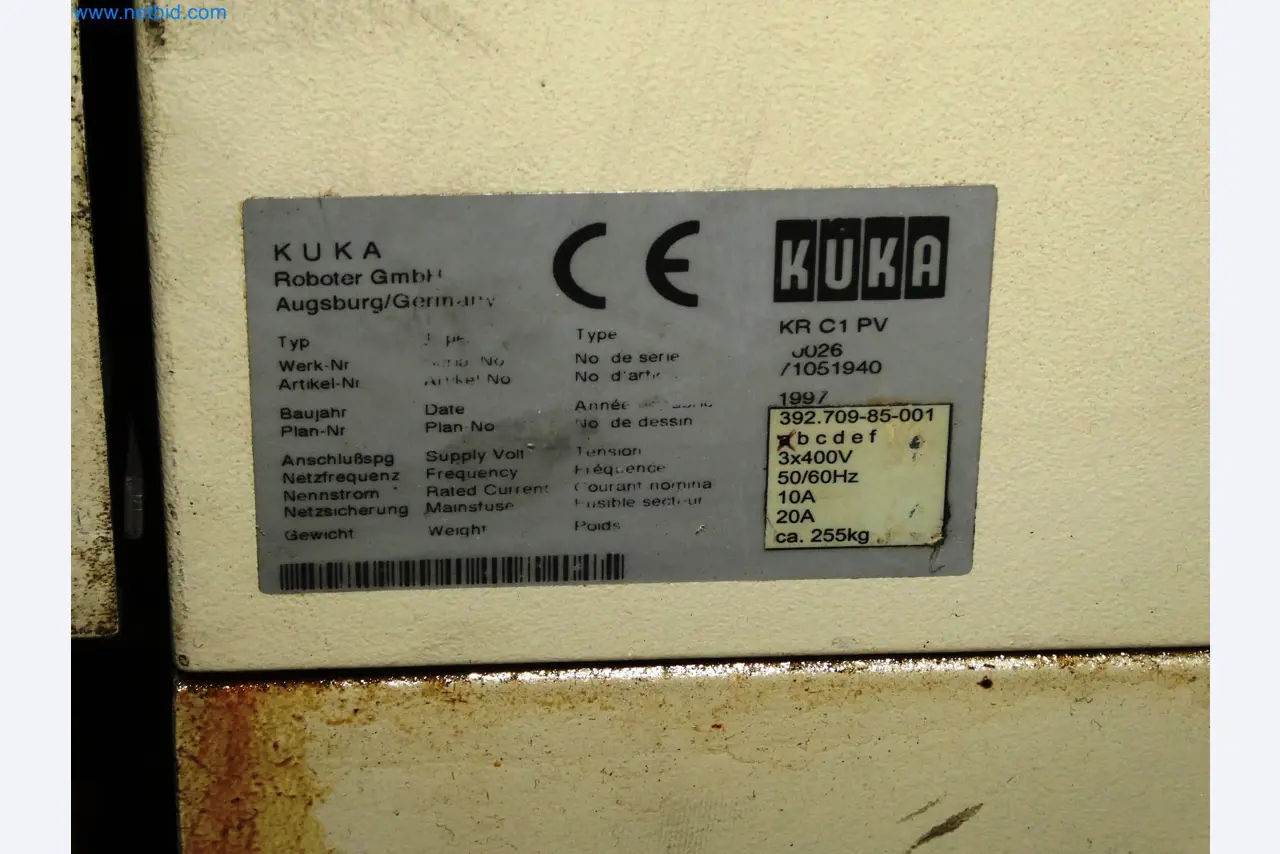
Robot 6-osiowy, Kuka, typ KR60/P2 TJ, zbudowany w 1997 r., SN 70017, nr systemu. 1804600, jednostka sterujaca, typ KRC1.04, z szafa sterownicza i reczna jednostka sterujaca
6-osiowy robot, Kuka, typ KR 60P/2, rok 1997, SN 770006, nr systemu 1803200, jednostka sterujaca, typ KRC1.PV, z szafa sterownicza i reczna jednostka sterujaca
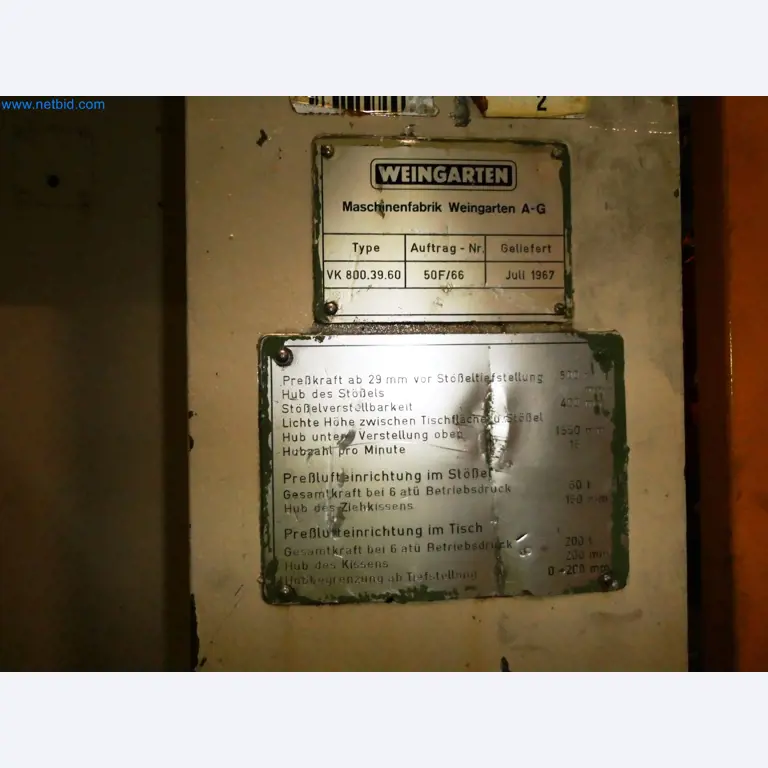
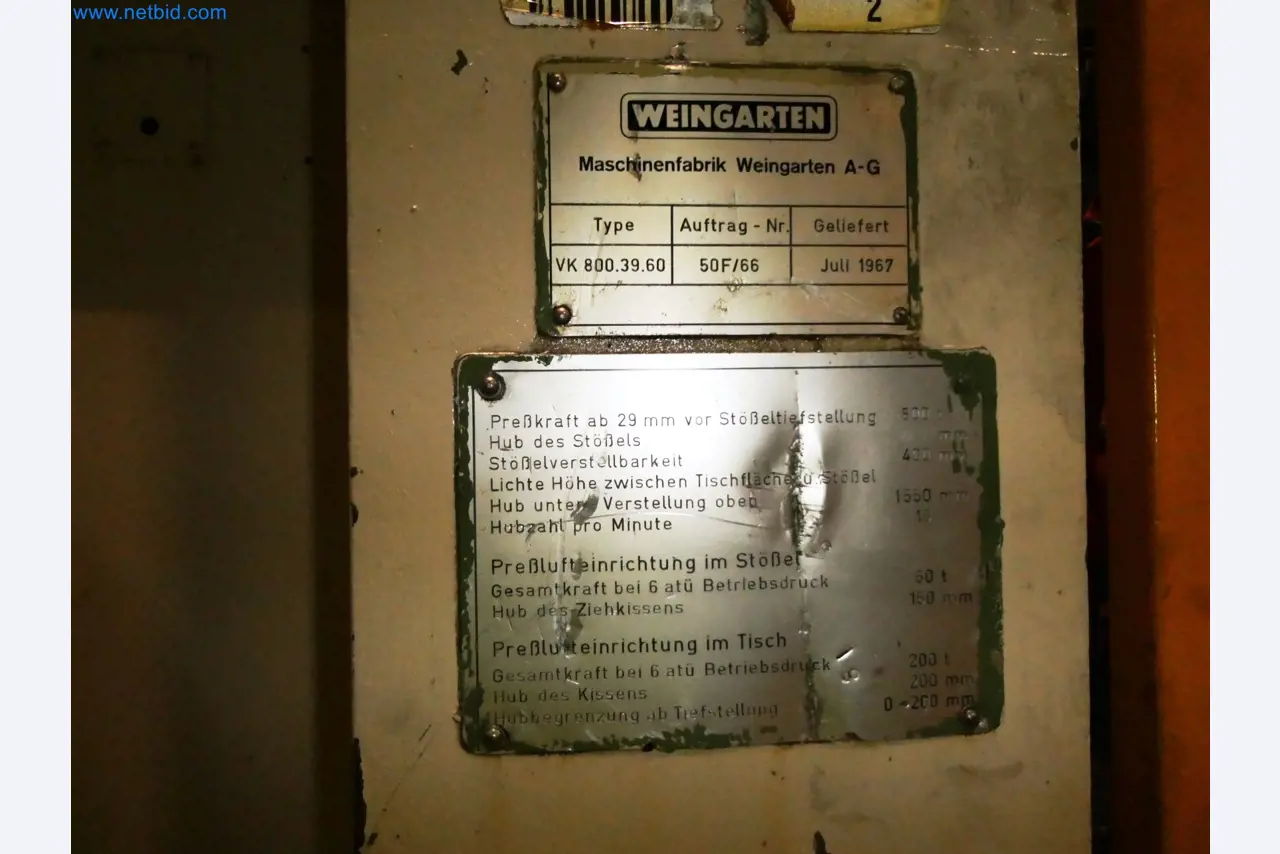
hydr. Prasa (76/2), wyprodukowana przez Weingarten, typ VK800.39.60, nr fabryczny 0176200, rok 1967, pojedyncze dzialanie, nr zamówienia 50F/66, sila nacisku 800 t, regulacja suwaka 400 mm, skok suwaka 600 mm, przeswit miedzy powierzchnia stolu a suwakiem 1,550 mm, wysokosc prasy silownik 1.550 mm, skok 16, skrzynki do rysowania pod cisnieniem 60 t, poduszka do rysowania skoku 150 mm, stól z rowkami teowymi, ok. 2.200 x 2.630 mm, sterowanie, typ OP-96 (Siemens S5)
Robot 6-osiowy, Kuka, typ KR 60P/2 TJ, rok produkcji 1997, SN 70038, waga 1.540 kg, nr systemowy 1803400, z szafa sterownicza i reczna jednostka sterujaca, typ KRC1
prasa hydrauliczna (76/3), Weingarten, typ VK 800.39.60, rok 1967, nr zamów. 50G/66, nr fabryczny 0176300, pojedyncze dzialanie, sila nacisku 800 t, regulacja suwaka 400 mm, wysokosc przeswitu miedzy powierzchnia stolu a suwakiem 1.550 mm, liczba skoków 16, sila tloczenia 60 t, skok tloczenia 150 mm, uklad sterowania, typ Press OP96 (Siemens S5), wymiary stolu 2200 x 3500 mm,
6-osiowy robot, Kuka, typ KR 60P/2, rok 1997, SN 770004, waga 1540 kg, nr maszyny 1803600, w. uklad sterowania, typ KRC1, sterowanie reczne, typ KRC1, nr maszyny 18076300, jednostronnego dzialania, sila tloczenia 800 t, regulacja suwaka 400 mm, wysokosc w swietle miedzy powierzchnia stolu a suwakiem 1. Sterowanie, typ KRC1, sterowanie reczne
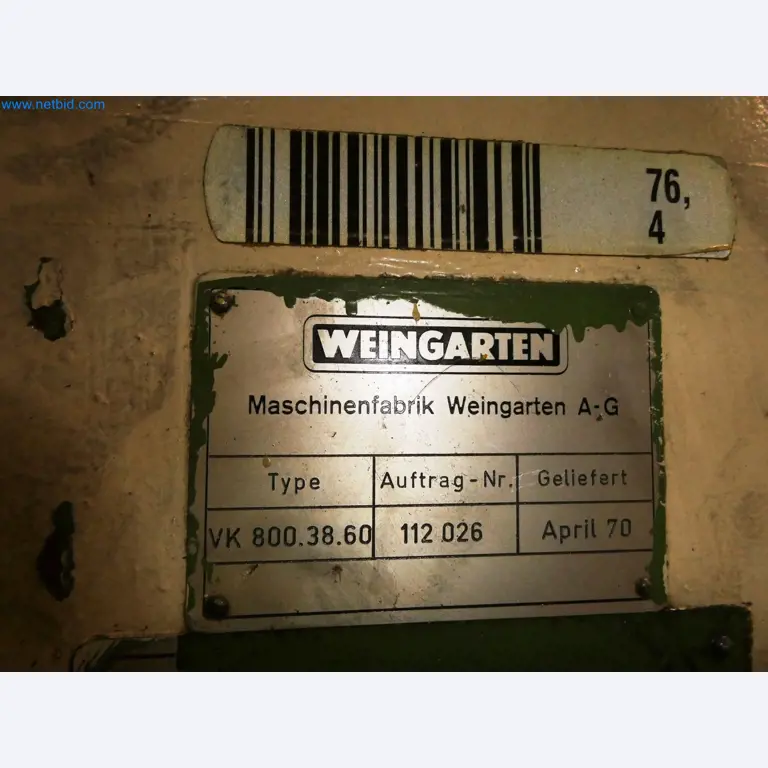
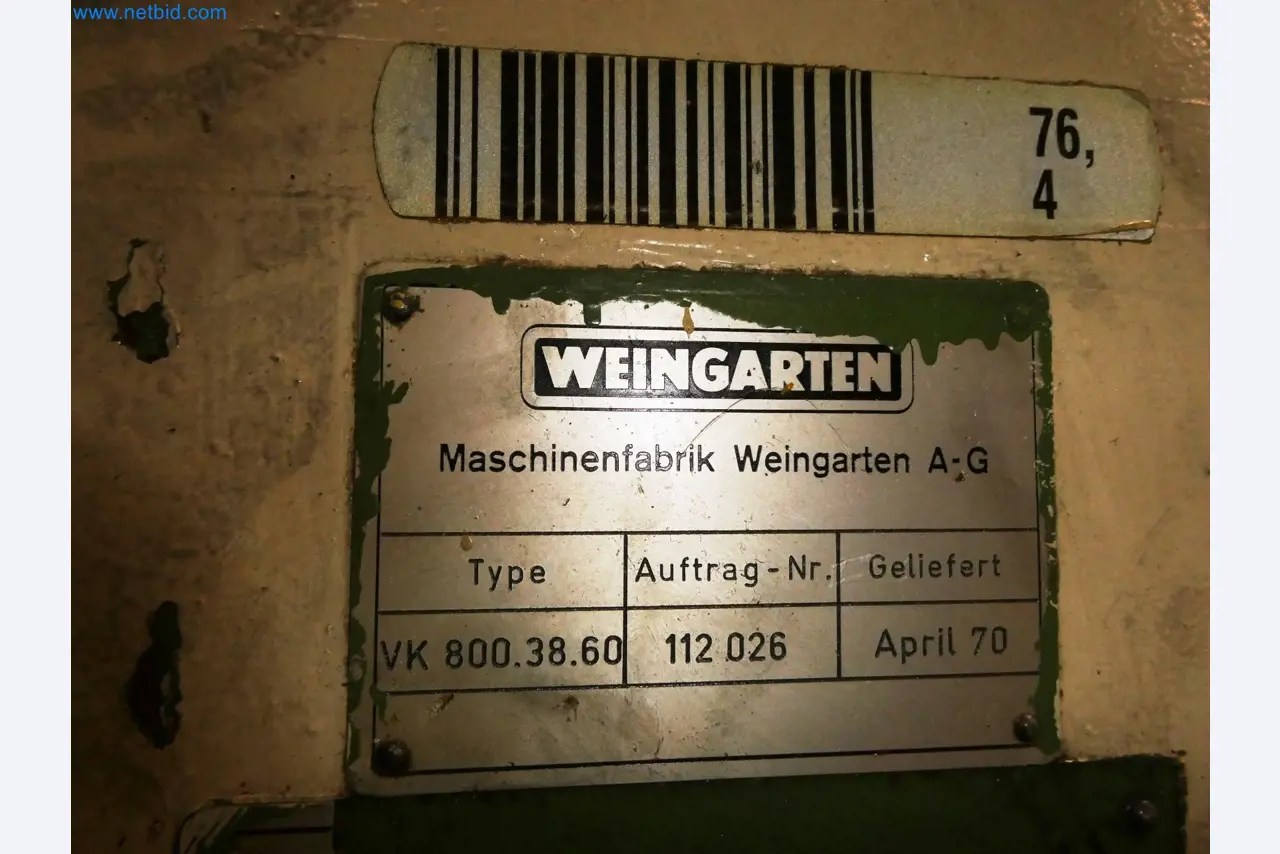
Prasa hydrauliczna (76/4), Weingarten, typ VK800.38.60, rok 1970, nr zamówienia 112026, nr systemu 0176400, jednostronnego dzialania, sila nacisku 800 t, skok suwaka 600 mm, regulacja suwaka 400 mm, wysokosc w swietle miedzy powierzchnia stolu a suwakiem 1.550 mm. suwak 1550 mm, skok 16, sila tloczenia 60 t, skok tloczenia 150 mm, rozmiar stolu 3500 x 2660 mm, sterowanie, typ OP-96 (Siemens S5)
6-osiowy robot, material. Kuka, typ KR 60P/2 TJ, rok 1997, SN 770017, waga 1,540 kg, sterowanie, typ KRC1 PV, reczna jednostka sterujaca
hydr. prasa (76/5), Weingarten, system nr 0176500, pojedyncze dzialanie, stól T-slot, ok. 3,500 x 2. 660 mm, system sterowania, typ Press.660 mm, system sterowania, typ Press-OP96 (Siemens S5)
6-osiowy robot, Kuka, typ KR 60P/2 TJ, rok 1997, SN 770037, waga 1,540 kg, system nr 1802900, system sterowania, typ KRC1 PV i reczna jednostka sterujaca
Magnetyczny przenosnik tasmowy, Fabr. Neuhäuser, typ 2.126-0, rok 2010, nr zamówienia 378031-01, dlugosc ok. 3 000 mm
Przenosnik tasmowy, Bauer, nr systemu 1500400, wymiary przenosnika 8 000 x 1 200 mm
System ogrodzenia ochronnego wokól komórek robotów i przestrzeni miedzy prasami, oswietlenie system ogrodzenia wokól komórek robotów i przestrzeni miedzy prasami, sprzet oswietleniowy, sprzet zliczajacy, szafy sterownicze systemu na galerii
Linia dostepna od grudnia 2025
Demontaz moze byc oferowany jako opcja
Lokalizacja
- Deutschland/ Halle B/ Stamping/ Linie 76
Terminy
Inspekcja
Tylko po wcześniejszej pisemnej rejestracji i umówieniu się na weyand@netbid.com
Należy pamiętać o wymaganiach dotyczących dostępu, które można znaleźć w warunkach aukcji.
Należy pamiętać o wymaganiach dotyczących dostępu, które można znaleźć w warunkach aukcji.
Odbiór
Po uzgodnieniu.
Warunki aukcji
Ze względu na wymagania dotyczące dostępu, potrzebujemy następujących informacji, aby umówić się na spotkanie
Pełna nazwa firmy, imię i nazwisko oraz dane kontaktowe
Jakie obszary produkcji są interesujące
Preferowana data i godzina
Liczba uczestników i nazwiska
Warunki specjalne:
Warunki specjalne:
- Wymagania dotyczące dostępu
- Specyfikacje BHP
- Różne warunki aukcji
Niektóre części tej strony zostały przetłumaczone maszynowo. Obowiązuje niemiecki oryginalny tekst.
Spersonalizowane porady
Nasi eksperci chętnie Ci doradzą. Zadzwoń +49 40 355059 -132 lub napisz service@netbid.com


