Część aukcji Linie prasowe z branży motoryzacyjnej
Linia prasowa (78A) SchulerLIVE#18844-5002
Ta aukcja jest zakończona.







































































Szczegóły
Marka
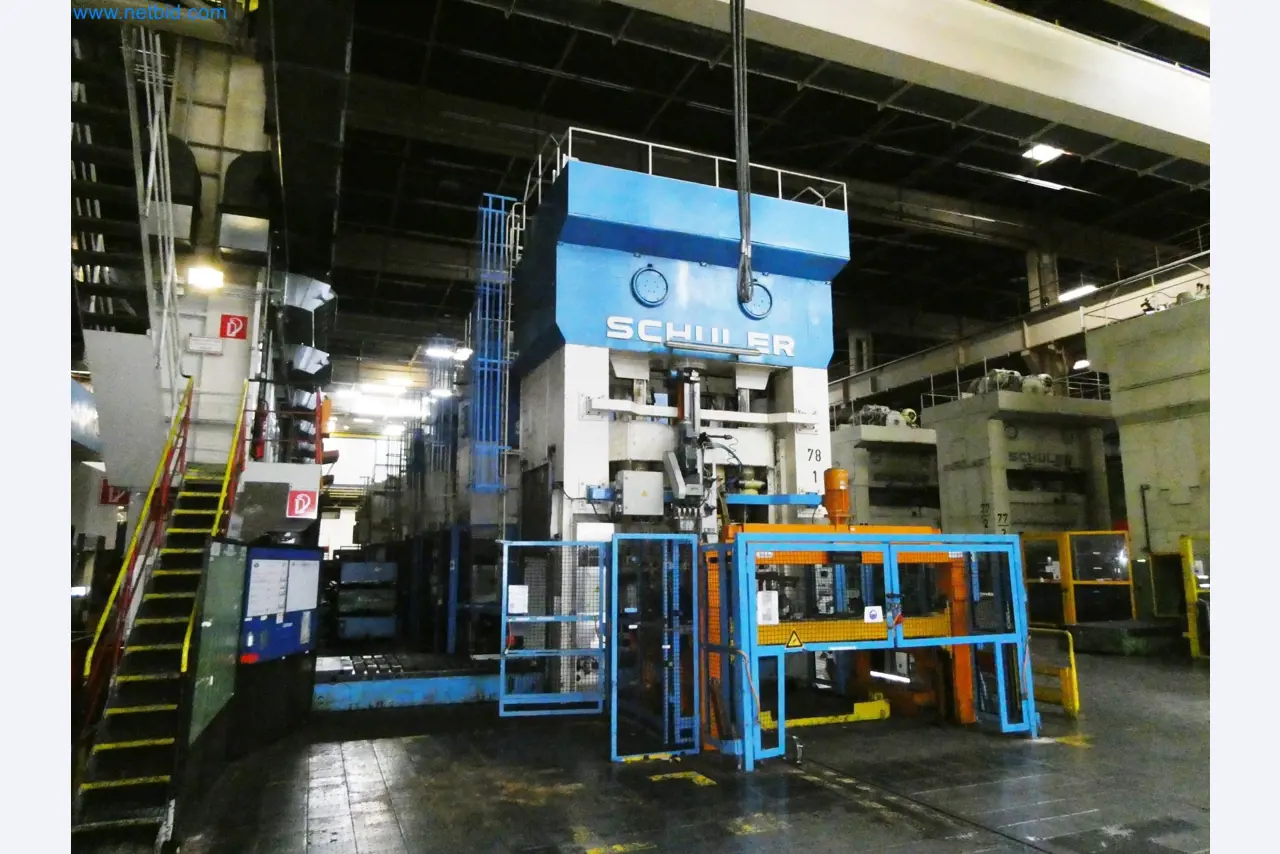
Schuler
Opis
Ostatni remont 2001, linia nie działa, części usunięte, ostatni remont w 2001, składający się z:
Automatyka płytowa, produkcji GMG Automation, zbudowana ok. 1986 r., nr systemu 0903800, z ruchomym wózkiem paletowym, ramieniem załadowczym, produkcji Olofström, nr systemu 0600800
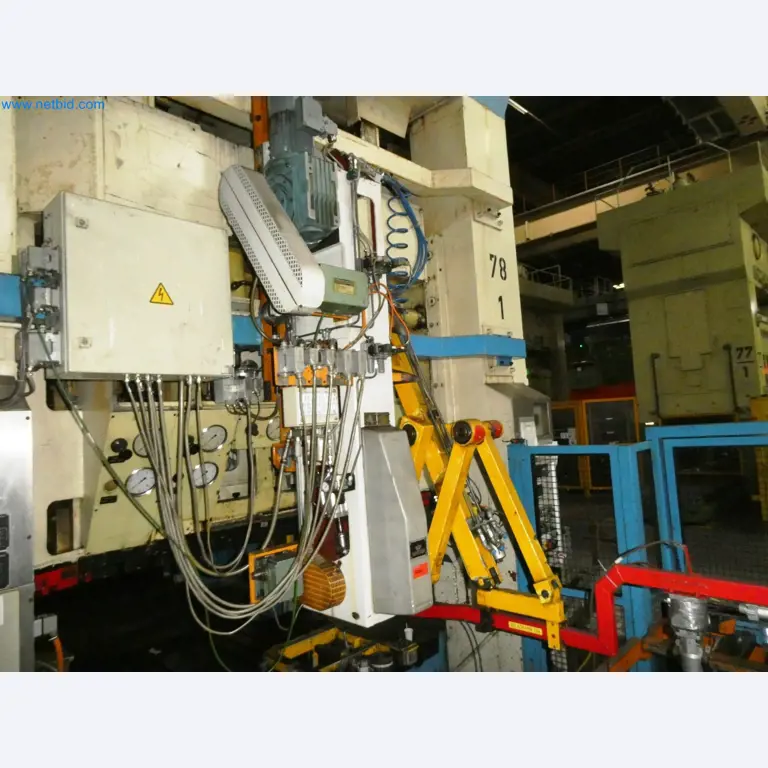
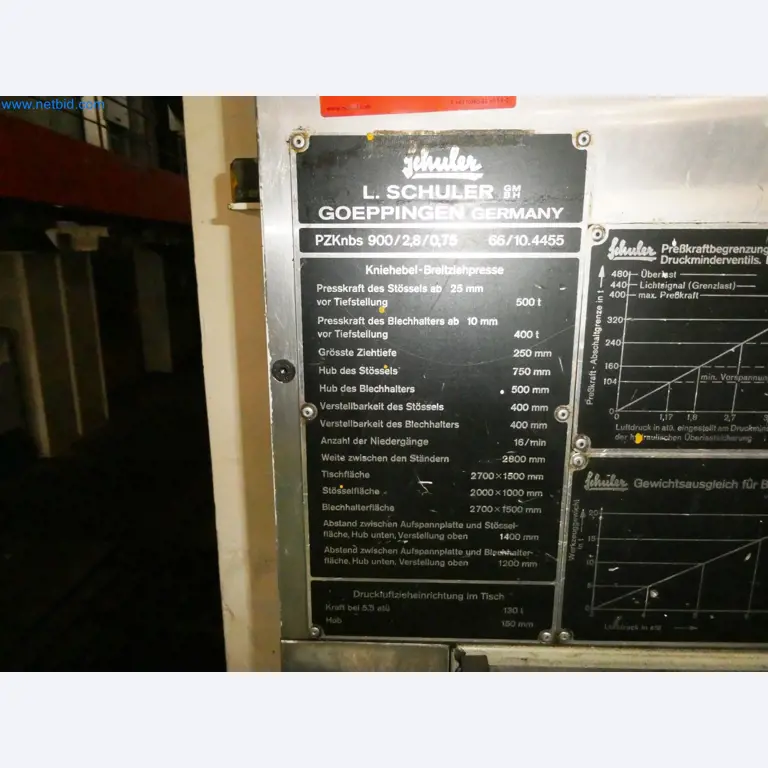
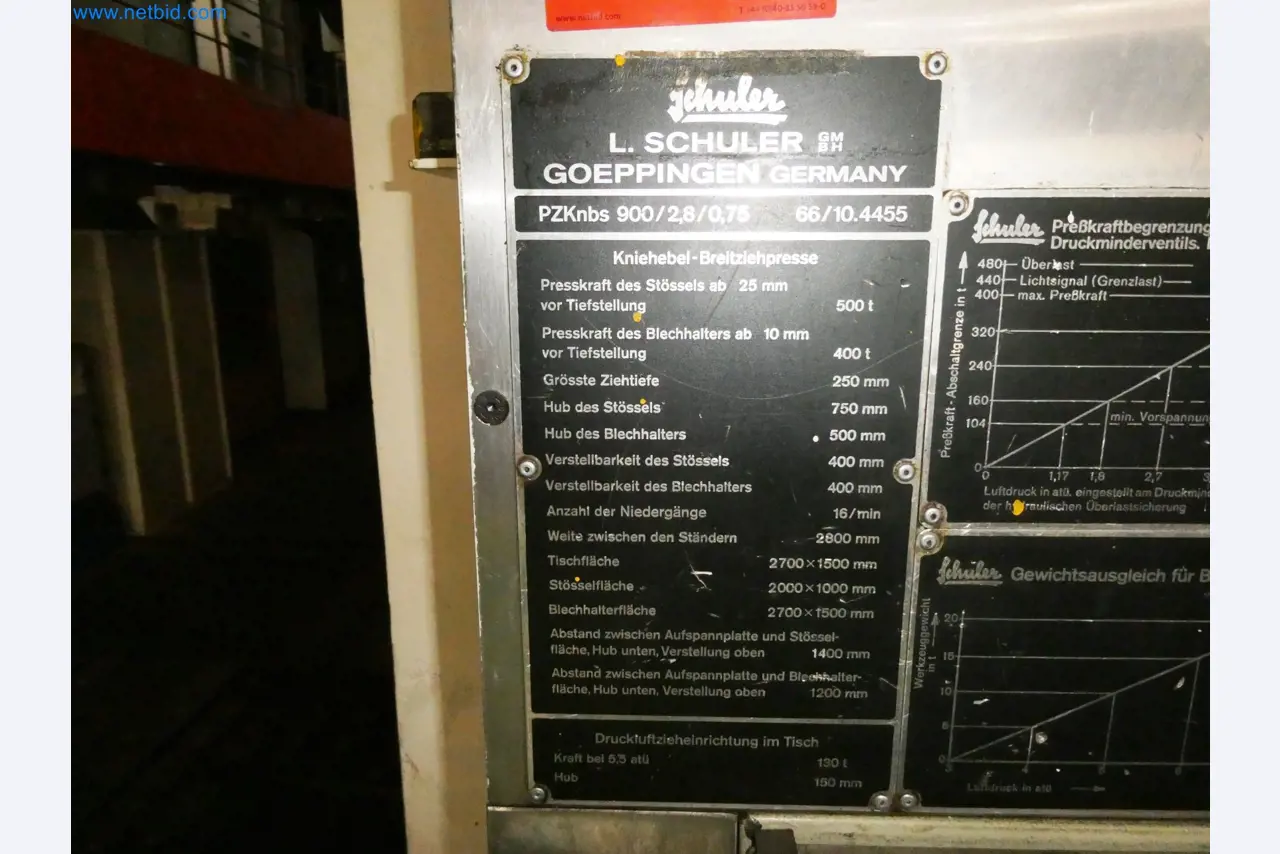
Prasa do szerokiego tłoczenia z dźwignią przełączającą, Schuler, typ PZKNBS 900/2.8/0.75, SN 66/10.4455, podwójne działanie, siła nacisku suwaka 500 t, siła nacisku uchwytu arkusza 400 t, głębokość tłoczenia 250 mm, skok suwaka 750 mm, regulacja uchwytu arkusza 400 mm, regulacja suwaka 400 mm, regulacja uchwytu arkusza 400 mm, niska prędkość 16/min, szerokość pionowa 2. 800 mm, powierzchnia stołu 2.700 mm.800 mm, powierzchnia stołu 2,700 x 1,500 mm, powierzchnia suwaka 2,000 x 1,000 mm, powierzchnia uchwytu arkusza 2,700 x 1,500 mm, odległość między płytą mocującą a powierzchnią suwaka 1,400 mm, odległość między płytą mocującą a powierzchnią uchwytu arkusza 1,200 mm, z bocznym przejściem w kolumnie 1,600 x 1,950 mm, 2 wózki do wymiany narzędzi, sterowanie Siemens, typ S7.
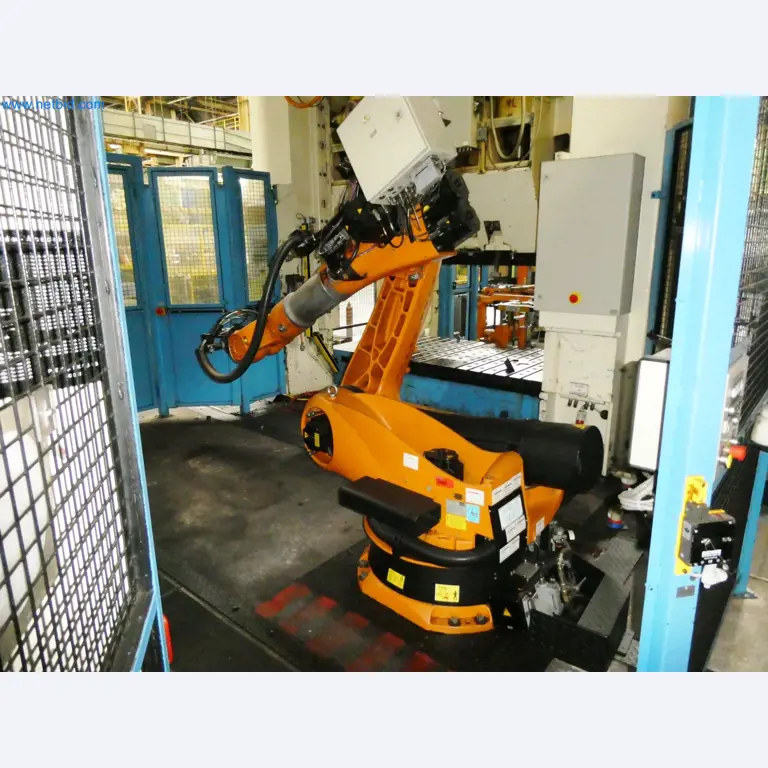
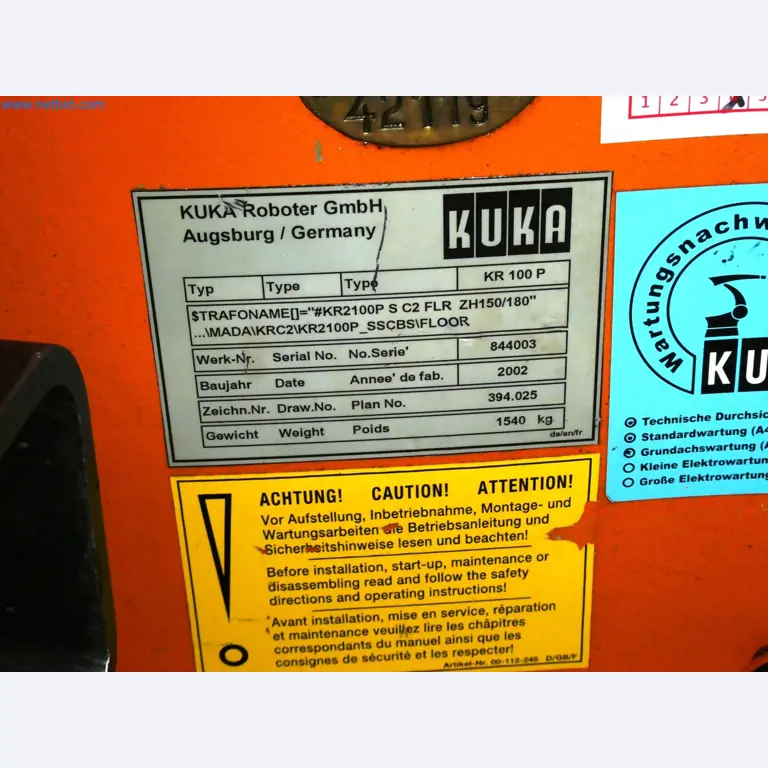
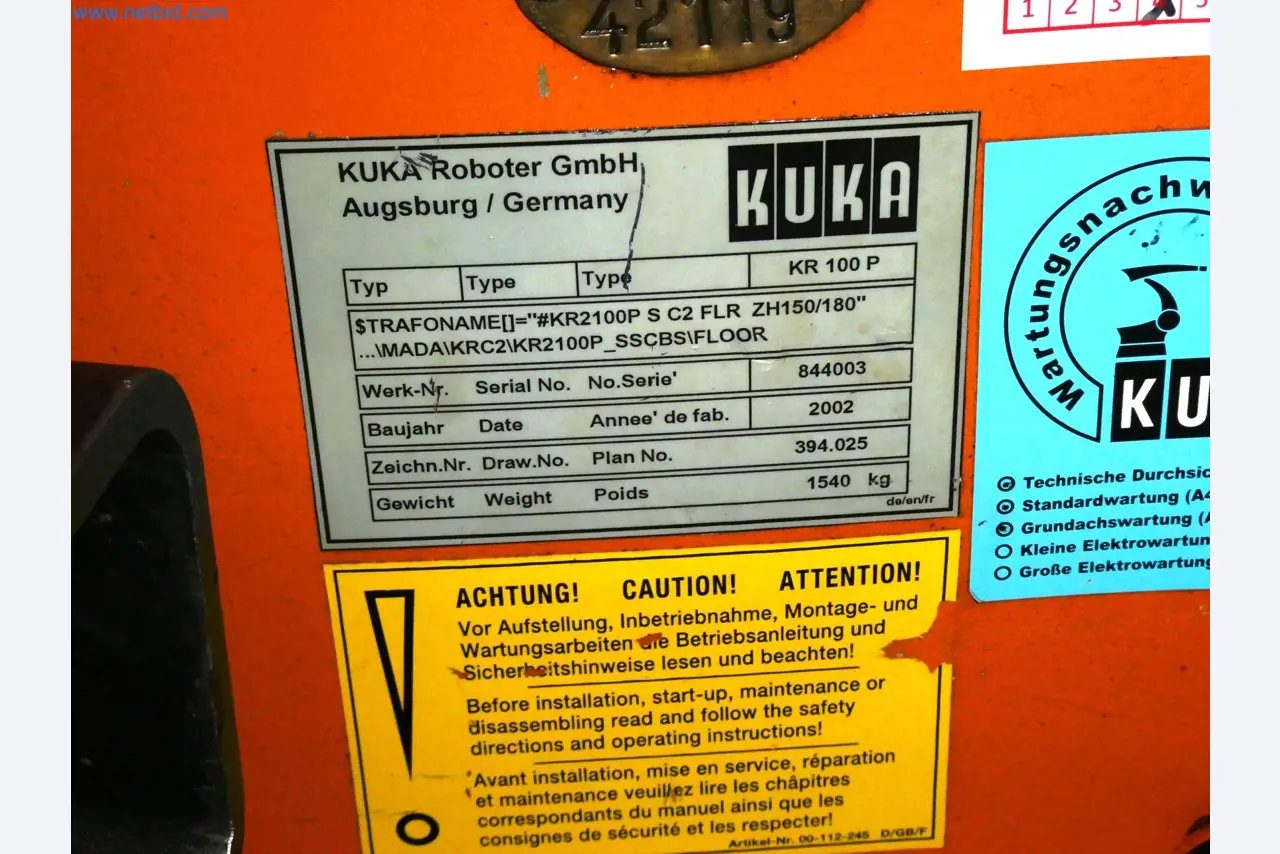
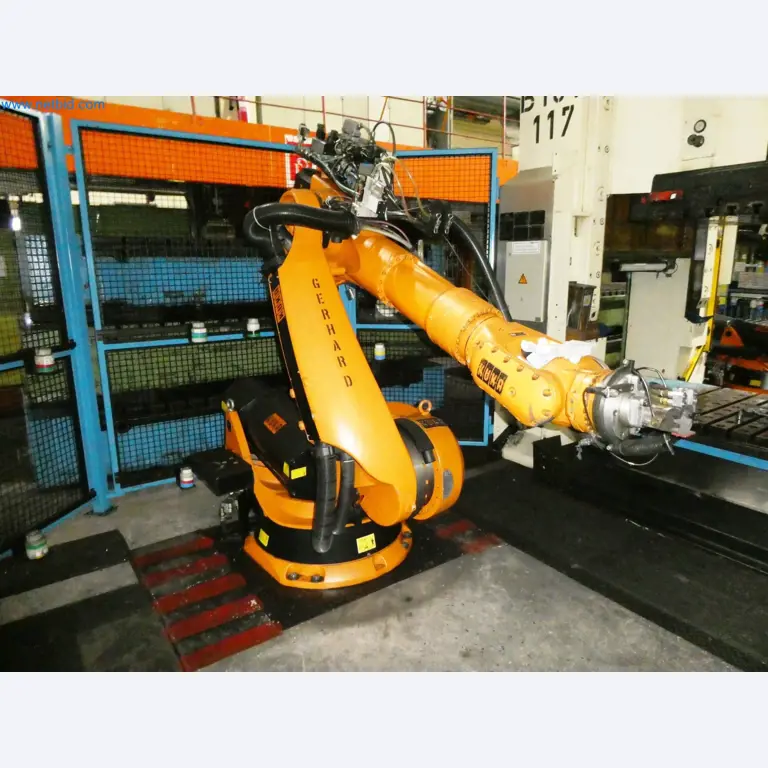
Robot 6-osiowy, Kuka, typ KR 100 P, rok produkcji 2002, SN 844003, waga 1.540 kg, system nr 1883900, system sterowania, typ KRC2, system nr 3035600
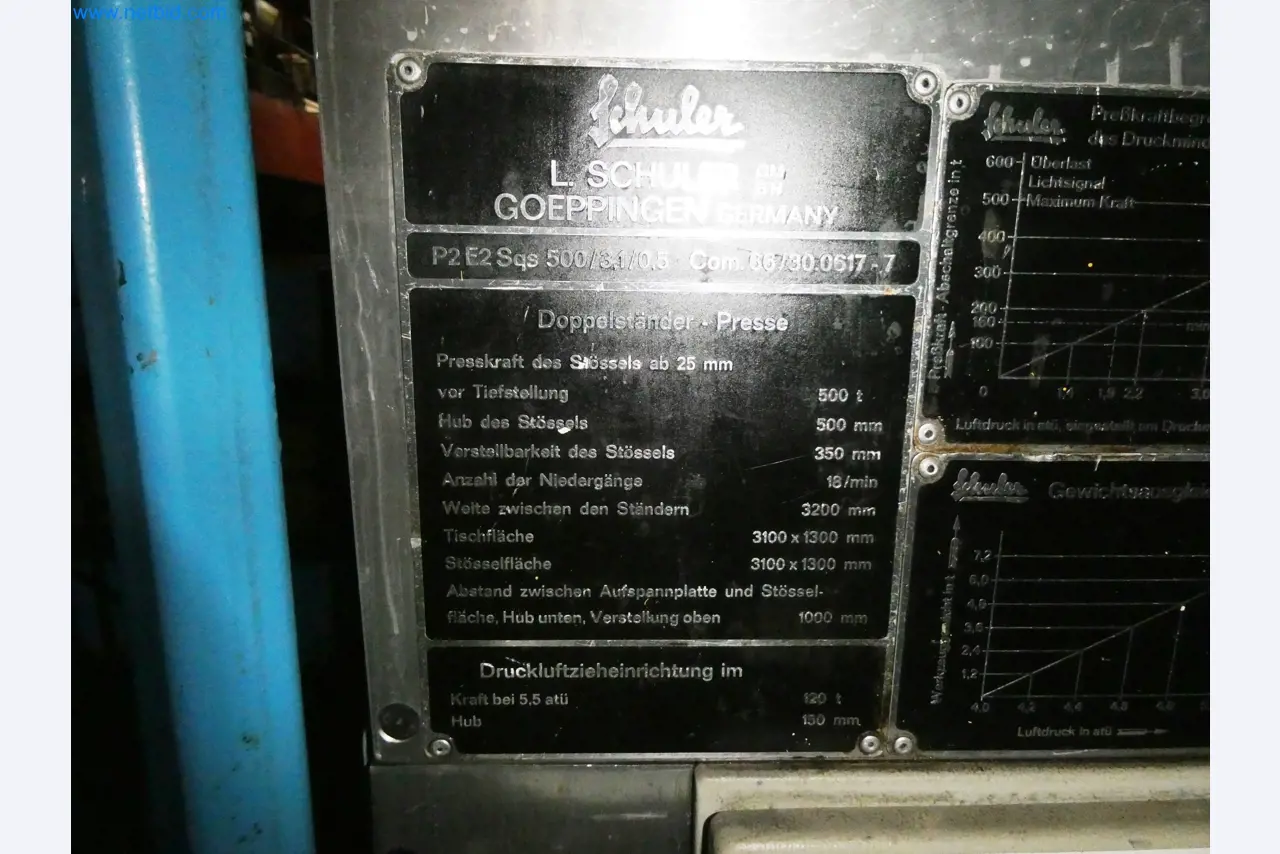
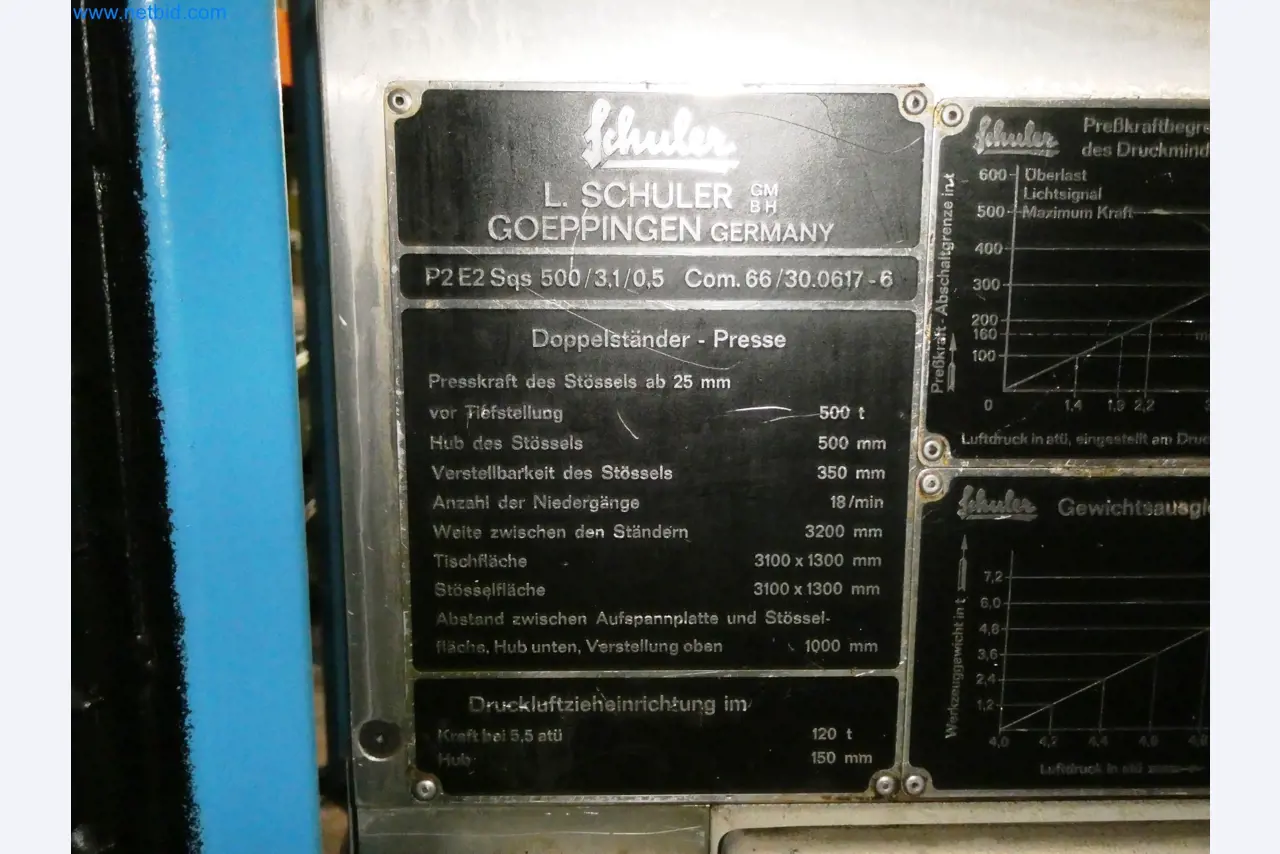
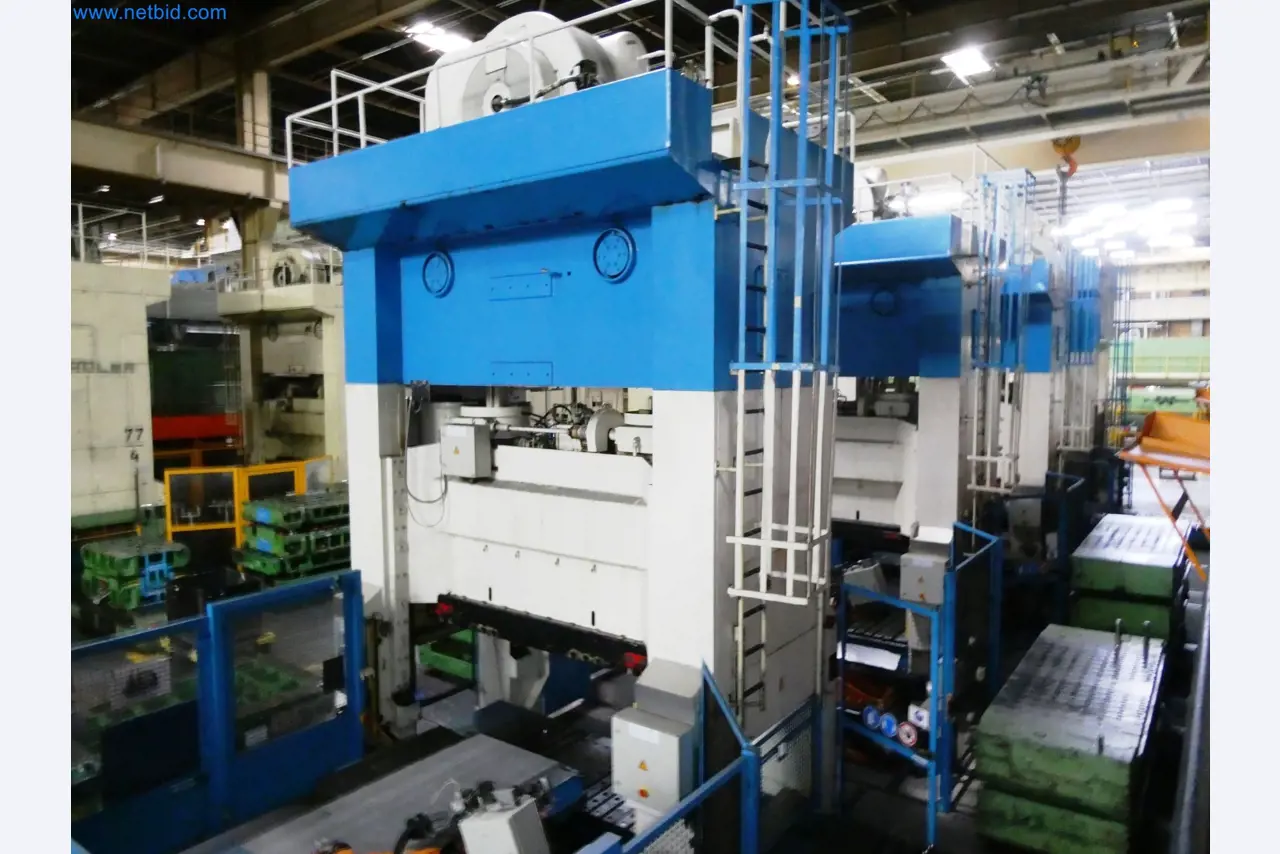
Prasa dwukolumnowa, Schuler, typ P2E2 SQS 500/3.1/0.5, SN 66/30.617-7, jednostronnego działania, siła nacisku suwaka 500 t, skok suwaka 500 mm, regulacja suwaka 350 mm, posuw w dół 18/min, szerokość kolumny 3,200 mm, powierzchnia stołu 3,100 mm.200 mm, powierzchnia stołu 3,100 x 1,300 mm, powierzchnia suwaka 3,100 x 1,300 mm, odległość między płytą mocującą a powierzchnią suwaka 1,000 mm, boczne przejście kolumny 1,400 x 1,500 mm, sterowanie, Siemens, typ S7
6-osiowy robot, Kuka, typ KR 100 P, zbudowany w 2002 r., nr systemu 1883800, układ sterowania, typ KRC2, nr systemu 3085200
Prasa dwukolumnowa, Schuler, typ P2E2 SQS 500/3.1/0.5, SN 66/30.0617-6, siła nacisku suwaka 500 t, skok suwaka 500 mm, regulacja suwaka 350 mm, posuwy 18/min, szerokość kolumny 3.200 mm, powierzchnia stołu 3.100 x 1. 300 mm, powierzchnia suwaka 3.100 x 1. 300 mm.300 mm, powierzchnia suwaka 3,100 x 1,300 mm, odległość między płytą mocującą a powierzchnią suwaka 1,000 mm, boczne przejście kolumny 1,400 x 1,500 mm, system sterowania, Siemens, 2 wózki do wymiany form, system sterowania Siemens, typ S7.
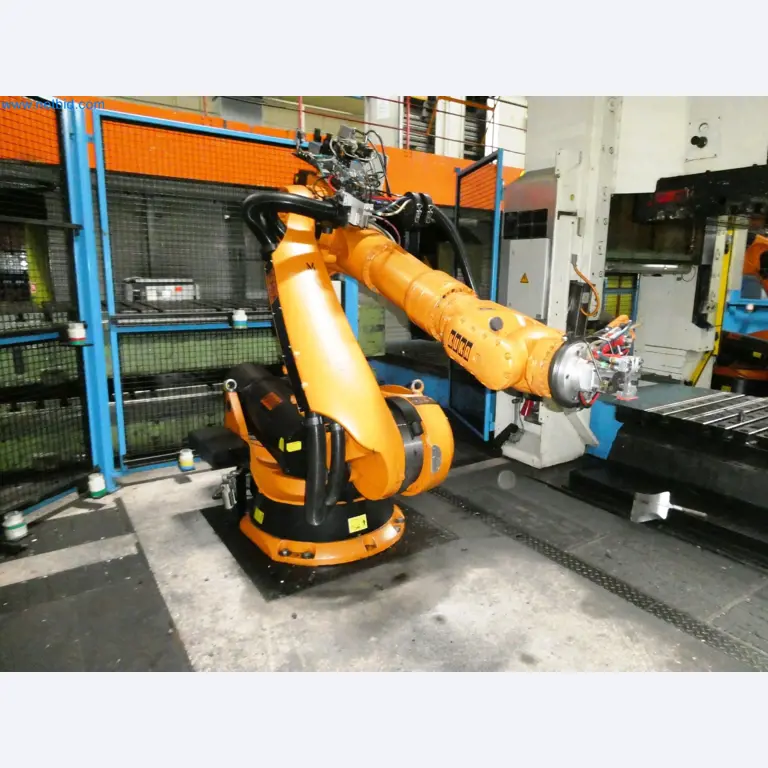
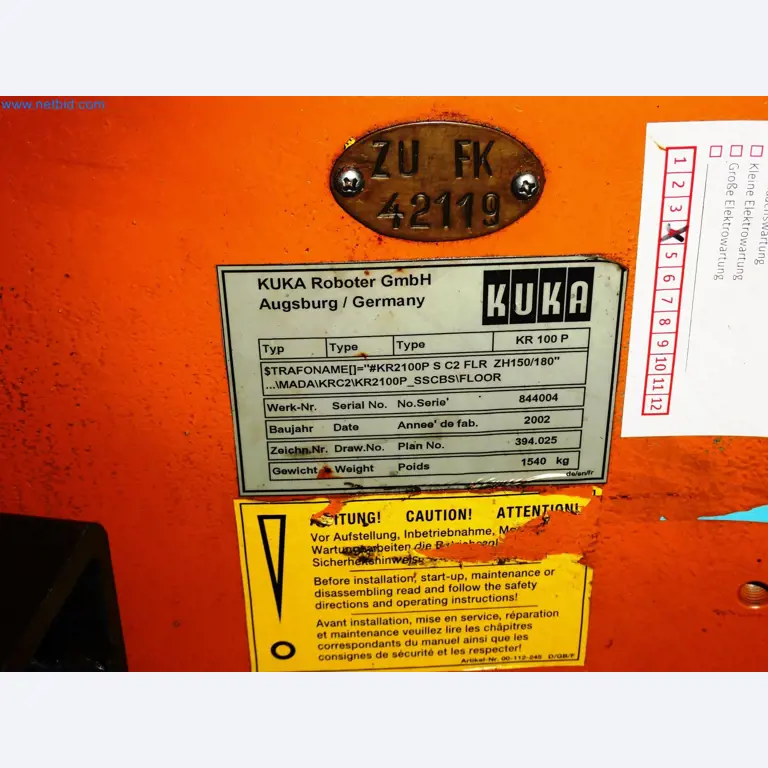
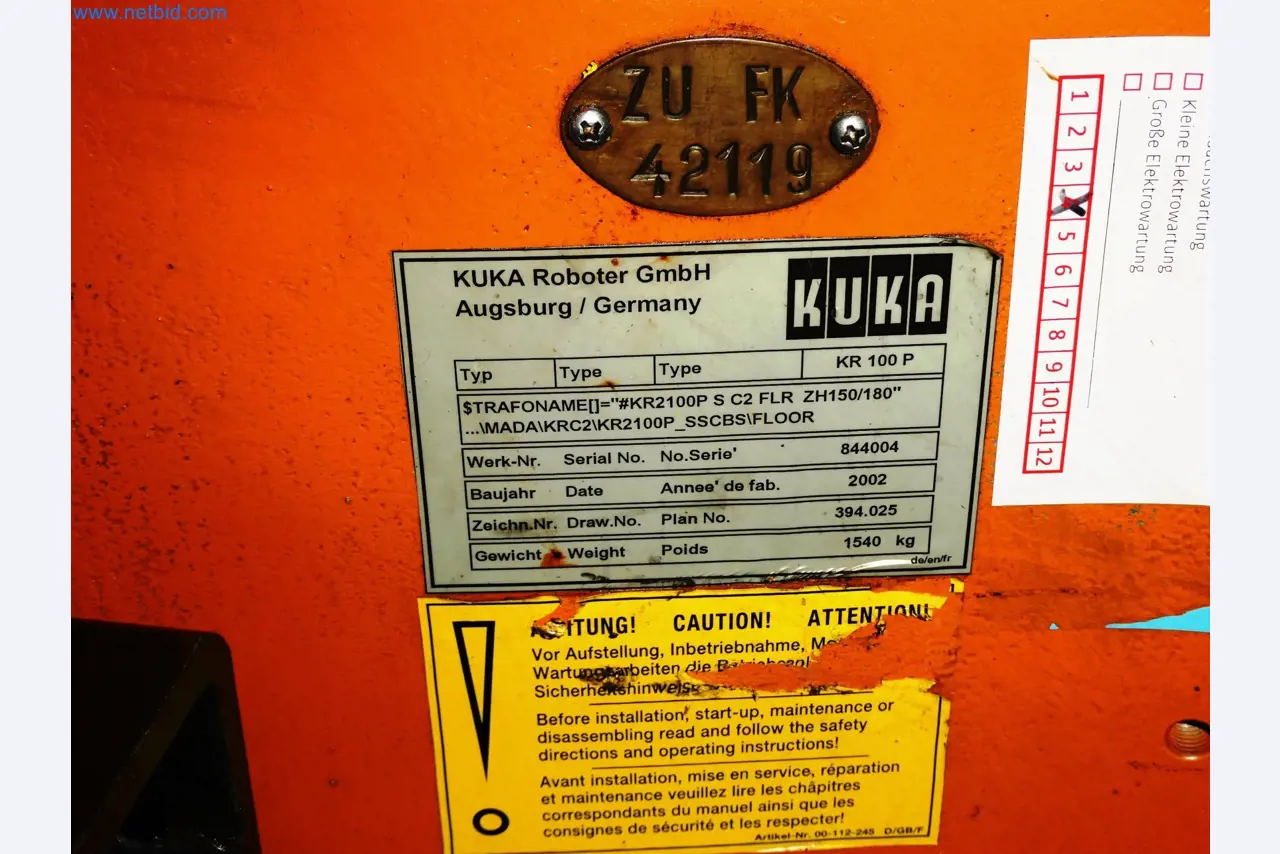
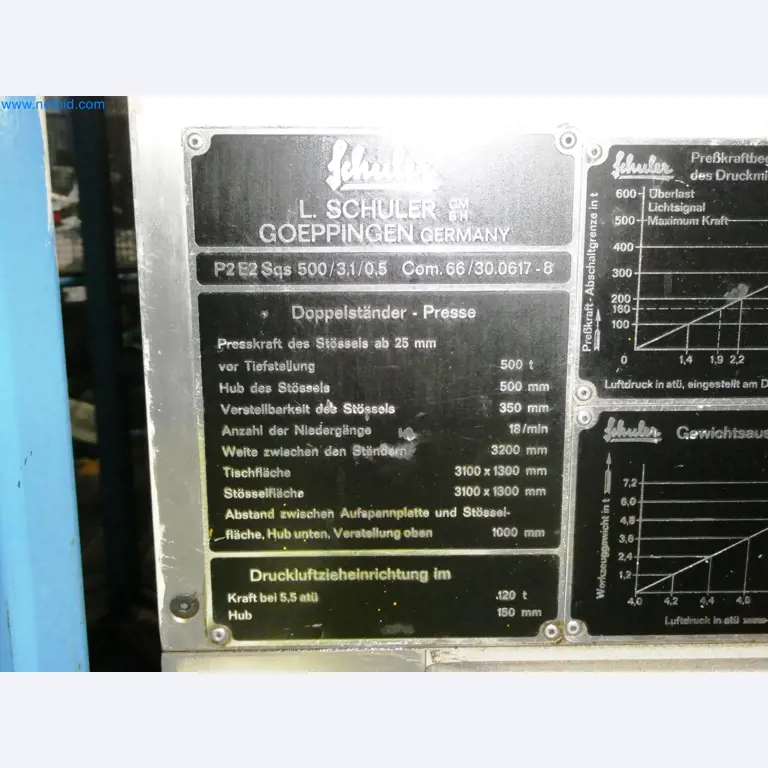
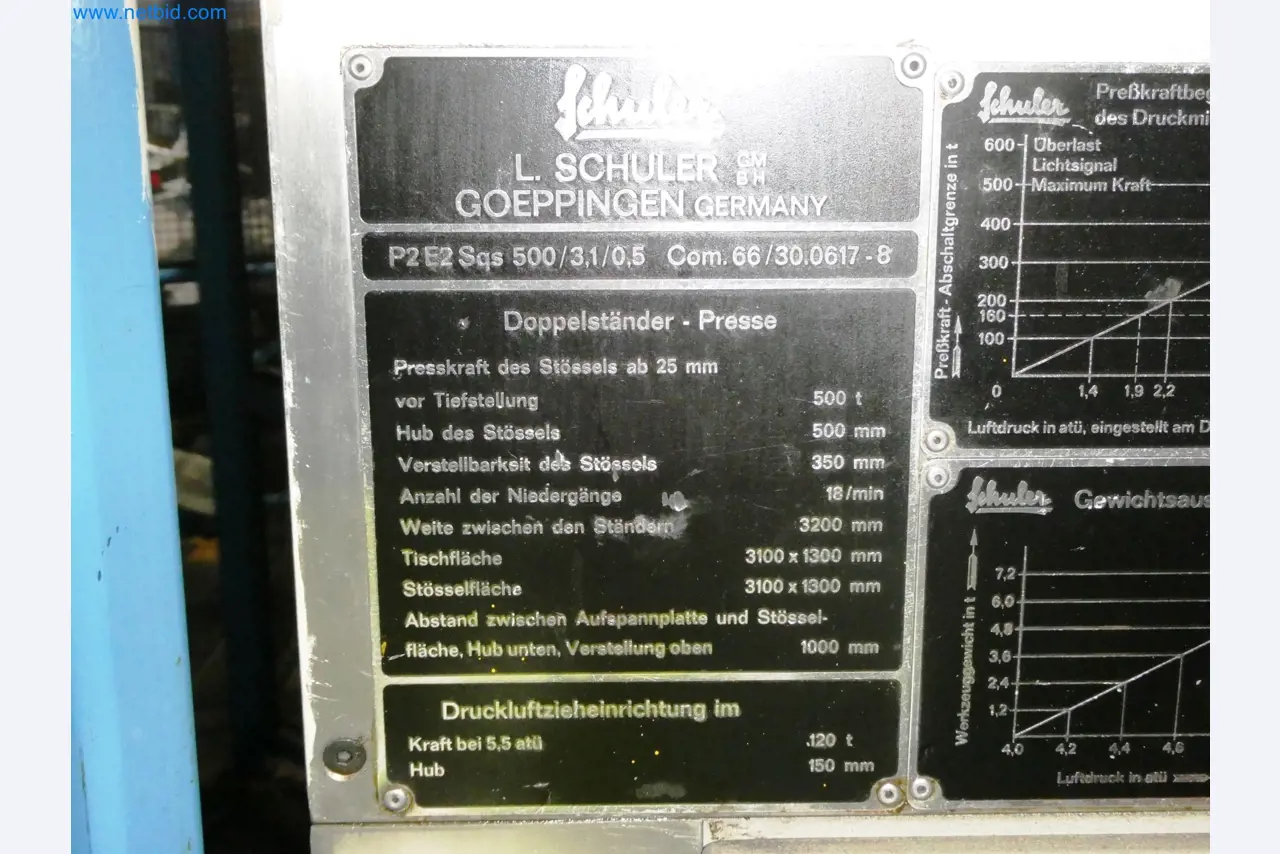
6-osiowy robot, Kuka, typ KR 100 P, zbudowany 2002, SN 844004, waga 1.540 kg, system nr 1884100, system sterowania, typ KRC2, system nr 3034500, prasa dwukolumnowa, Fabr. Schuler, typ P2E2 SQS 500/3.1/0.5, SN 66/30.0617-8, siła nacisku suwaka 500 t, skok suwaka 500 mm, regulacja suwaka 350 mm, skoki w dół 18/min, szerokość kolumny 3,200 mm, powierzchnia stołu 3,100 mm.200 mm, powierzchnia stołu 3,100 x 1,300 mm, powierzchnia suwaka 3,100 x 1,300 mm, odległość między płytą mocującą a powierzchnią suwaka 1,000 mm, boczne przejście kolumny 1,400 x 1,500 mm, sterowanie, Siemens typ S7, 2 wózki do wymiany narzędzi.
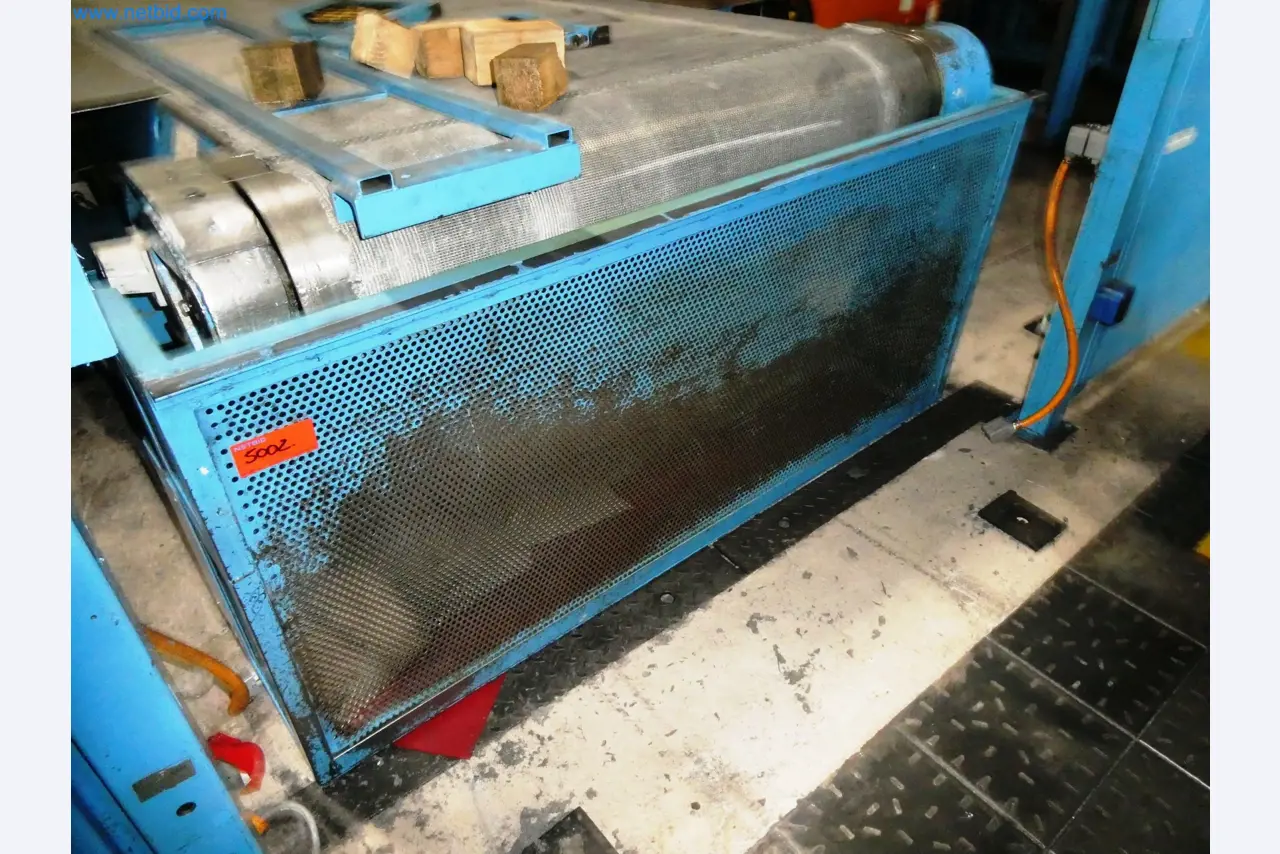
Nachylony przenośnik taśmowy, BDZ, długość ok. 1.500 mm, szerokość przenośnika ok. 400 mm, na rolkach
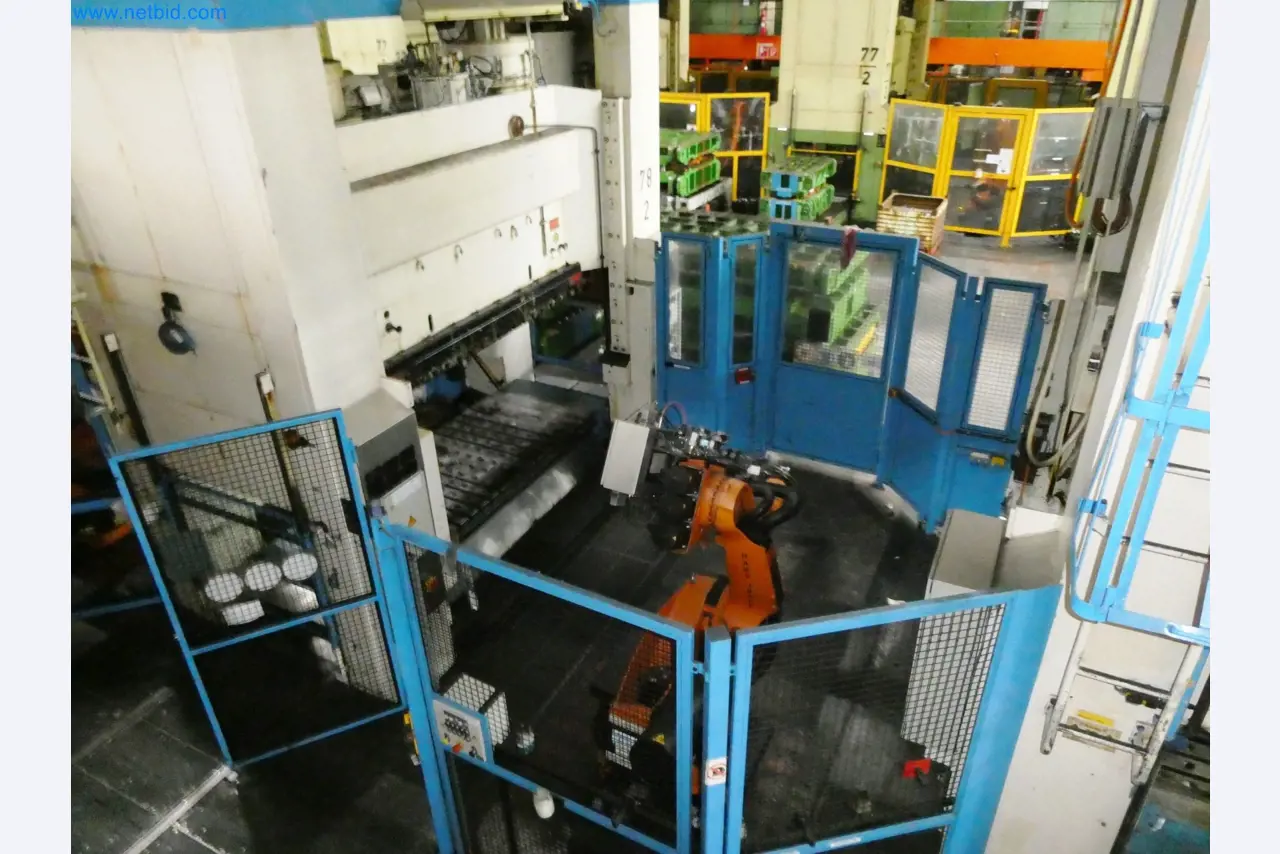
Robot 6-osiowy, produkcji Kuka, typ KR 100 P, rok produkcji 2002, SN 844005, waga 1.540 kg, nr systemu 1829600, system sterowania, typ KRC2, nr systemu 3085400
Przenośnik taśmowy, regulowana wysokość, wymiary przenośnika ok. 4500 x 1200 mm
System ogrodzeń zabezpieczających, do zabezpieczania pośrednich obszarów pras i komórek robotów
Szafki sterownicze na galerii
System dostępny natychmiast
Demontaż może być oferowany jako opcja
Automatyka płytowa, produkcji GMG Automation, zbudowana ok. 1986 r., nr systemu 0903800, z ruchomym wózkiem paletowym, ramieniem załadowczym, produkcji Olofström, nr systemu 0600800
Prasa do szerokiego tłoczenia z dźwignią przełączającą, Schuler, typ PZKNBS 900/2.8/0.75, SN 66/10.4455, podwójne działanie, siła nacisku suwaka 500 t, siła nacisku uchwytu arkusza 400 t, głębokość tłoczenia 250 mm, skok suwaka 750 mm, regulacja uchwytu arkusza 400 mm, regulacja suwaka 400 mm, regulacja uchwytu arkusza 400 mm, niska prędkość 16/min, szerokość pionowa 2. 800 mm, powierzchnia stołu 2.700 mm.800 mm, powierzchnia stołu 2,700 x 1,500 mm, powierzchnia suwaka 2,000 x 1,000 mm, powierzchnia uchwytu arkusza 2,700 x 1,500 mm, odległość między płytą mocującą a powierzchnią suwaka 1,400 mm, odległość między płytą mocującą a powierzchnią uchwytu arkusza 1,200 mm, z bocznym przejściem w kolumnie 1,600 x 1,950 mm, 2 wózki do wymiany narzędzi, sterowanie Siemens, typ S7.
Robot 6-osiowy, Kuka, typ KR 100 P, rok produkcji 2002, SN 844003, waga 1.540 kg, system nr 1883900, system sterowania, typ KRC2, system nr 3035600
Prasa dwukolumnowa, Schuler, typ P2E2 SQS 500/3.1/0.5, SN 66/30.617-7, jednostronnego działania, siła nacisku suwaka 500 t, skok suwaka 500 mm, regulacja suwaka 350 mm, posuw w dół 18/min, szerokość kolumny 3,200 mm, powierzchnia stołu 3,100 mm.200 mm, powierzchnia stołu 3,100 x 1,300 mm, powierzchnia suwaka 3,100 x 1,300 mm, odległość między płytą mocującą a powierzchnią suwaka 1,000 mm, boczne przejście kolumny 1,400 x 1,500 mm, sterowanie, Siemens, typ S7
6-osiowy robot, Kuka, typ KR 100 P, zbudowany w 2002 r., nr systemu 1883800, układ sterowania, typ KRC2, nr systemu 3085200
Prasa dwukolumnowa, Schuler, typ P2E2 SQS 500/3.1/0.5, SN 66/30.0617-6, siła nacisku suwaka 500 t, skok suwaka 500 mm, regulacja suwaka 350 mm, posuwy 18/min, szerokość kolumny 3.200 mm, powierzchnia stołu 3.100 x 1. 300 mm, powierzchnia suwaka 3.100 x 1. 300 mm.300 mm, powierzchnia suwaka 3,100 x 1,300 mm, odległość między płytą mocującą a powierzchnią suwaka 1,000 mm, boczne przejście kolumny 1,400 x 1,500 mm, system sterowania, Siemens, 2 wózki do wymiany form, system sterowania Siemens, typ S7.
6-osiowy robot, Kuka, typ KR 100 P, zbudowany 2002, SN 844004, waga 1.540 kg, system nr 1884100, system sterowania, typ KRC2, system nr 3034500, prasa dwukolumnowa, Fabr. Schuler, typ P2E2 SQS 500/3.1/0.5, SN 66/30.0617-8, siła nacisku suwaka 500 t, skok suwaka 500 mm, regulacja suwaka 350 mm, skoki w dół 18/min, szerokość kolumny 3,200 mm, powierzchnia stołu 3,100 mm.200 mm, powierzchnia stołu 3,100 x 1,300 mm, powierzchnia suwaka 3,100 x 1,300 mm, odległość między płytą mocującą a powierzchnią suwaka 1,000 mm, boczne przejście kolumny 1,400 x 1,500 mm, sterowanie, Siemens typ S7, 2 wózki do wymiany narzędzi.
Nachylony przenośnik taśmowy, BDZ, długość ok. 1.500 mm, szerokość przenośnika ok. 400 mm, na rolkach
Robot 6-osiowy, produkcji Kuka, typ KR 100 P, rok produkcji 2002, SN 844005, waga 1.540 kg, nr systemu 1829600, system sterowania, typ KRC2, nr systemu 3085400
Przenośnik taśmowy, regulowana wysokość, wymiary przenośnika ok. 4500 x 1200 mm
System ogrodzeń zabezpieczających, do zabezpieczania pośrednich obszarów pras i komórek robotów
Szafki sterownicze na galerii
System dostępny natychmiast
Demontaż może być oferowany jako opcja
Lokalizacja
- Deutschland/ Halle B/ Stamping/ Linie 78A
Terminy
Inspekcja
Tylko po wcześniejszej pisemnej rejestracji i umówieniu się na weyand@netbid.com
Należy pamiętać o wymaganiach dotyczących dostępu, które można znaleźć w warunkach aukcji.
Należy pamiętać o wymaganiach dotyczących dostępu, które można znaleźć w warunkach aukcji.
Odbiór
Po uzgodnieniu.
Warunki aukcji
Ze względu na wymagania dotyczące dostępu, potrzebujemy następujących informacji, aby umówić się na spotkanie
Pełna nazwa firmy, imię i nazwisko oraz dane kontaktowe
Jakie obszary produkcji są interesujące
Preferowana data i godzina
Liczba uczestników i nazwiska
Warunki specjalne:
Warunki specjalne:
- Wymagania dotyczące dostępu
- Specyfikacje BHP
- Różne warunki aukcji
Niektóre części tej strony zostały przetłumaczone maszynowo. Obowiązuje niemiecki oryginalny tekst.
Spersonalizowane porady
Nasi eksperci chętnie Ci doradzą. Zadzwoń +49 40 355059 -132 lub napisz service@netbid.com


